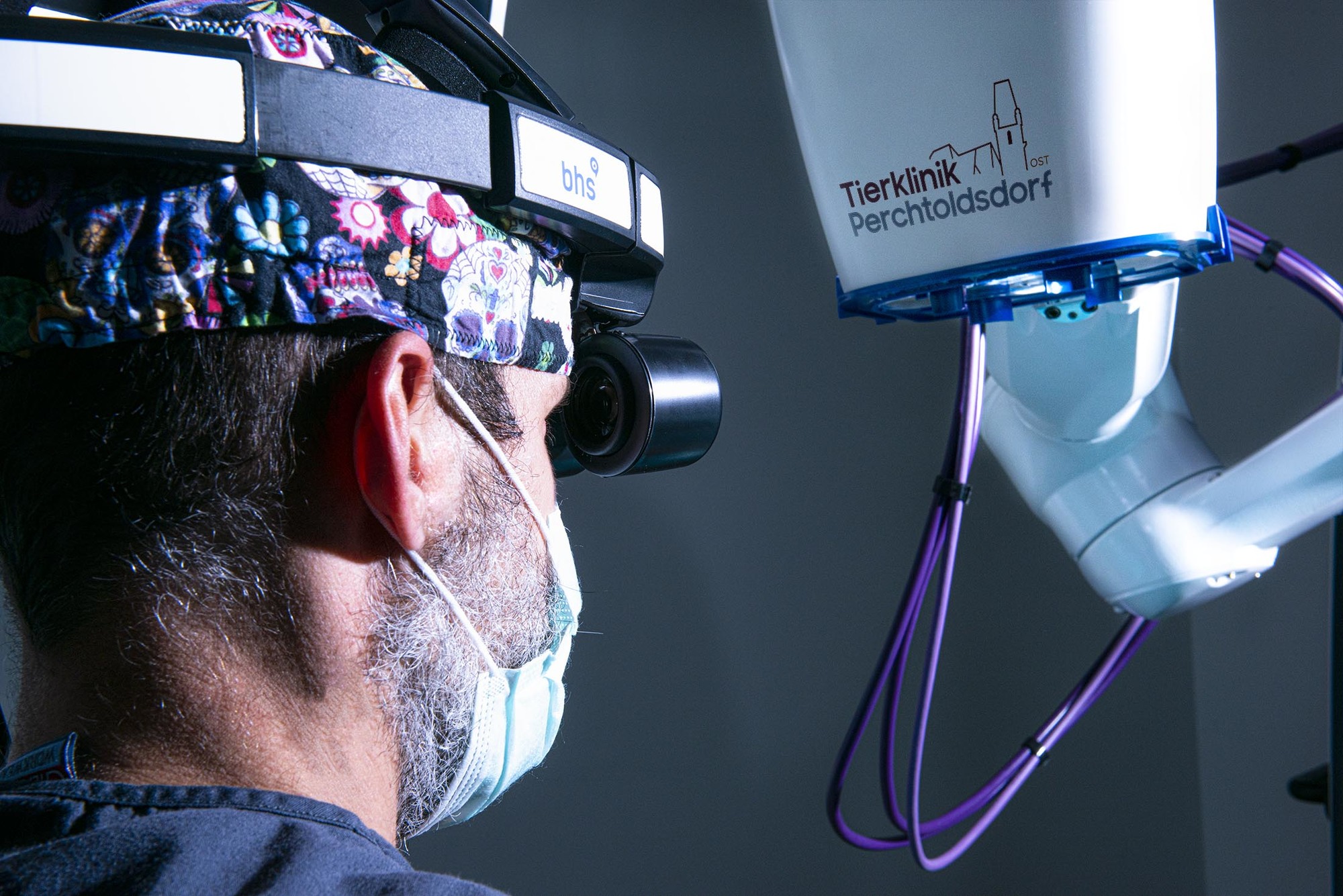
Durch das Head-Mounted-Display, das durch die Kopfbewegungen des Chirurgen die Roboterkamera steuert, hat der Arzt zwei digitale Mikrodisplays direkt vor seinen Augen. Menschen erfassen einen Gegenstand im Raum durch die Betrachtung aus diversen Blickwinkeln und Neigen des Kopfes – so intuitiv funktioniert auch das Robotic Scope. Wenn der Chirurg seinen Kopf neigt, erkennt dies das HMD und passt damit die Position der Kamera an.
Die Kamera befindet sich direkt über dem OP-Feld und sendet hochauflösende 3D-Bilder in Echtzeit an das Headset. Sie fokussiert auf anatomische Strukturen und dreht sich dann mithilfe des Roboterarms um diese. Dies trägt dazu bei, dass der Chirurg den Bereich in allen Perspektiven betrachten kann. Das Head-Mounted-Display und die Kamera sind entkoppelt, dadurch kann der Arzt mittels leichter Kopfbewegungen die Ansicht ändern, demnach also freihändig die Roboterkamera steuern; er hat den Operationsbereich immer im Blick ohne das Werkzeug weglegen und die Haltung der Kamera adjustieren zu müssen.
Abgesehen von der intuitiven Benutzung, der ergonomischen Haltung und der herausragenden Präzision, hat das Robotic Scope noch einen riesigen Vorteil gegenüber herkömmlichen Methoden: Die Zeitersparnis während der Operation. Davor waren noch schwere Mikroskope im Einsatz, die der Chirurg persönlich umstellen bzw. justieren musste, indem er das Besteck weglegte, den Operationsbereich aus den Augen lies und die Seite wechselte. Jetzt bewegt der Chirurg leicht seinen Kopf und sieht sofort das, was er sehen möchte, aber auch weitaus mehr als mit einem normalen Mikroskop. Die Operationszeit kann somit verkürzt werden, was das Narkoserisiko um ein Vielfaches minimiert. Dies wiederrum bedeutet, dass die Rekonvaleszenz der Patienten auch deutlich schneller ist.
Bisher wurden in erster Linie neurochirurgische Eingriffe, sowie Augenoperationen und Gefäßnähte mit Unterstützung des Robotic Scopes durchgeführt. Ab Mitte 2021 haben wir allerdings deutliche Erweiterungen geplant, von denen wir bald berichten werden.